无人机可以帮助极其精确地绘制月球表面地图-九游官网首页进入
探索月球最近越来越成为人们关注的焦点,特别是最近发射的一系列着陆器都取得了不同程度的成功。这些着陆器和任何未来的载人任务面临的困难之一是了解它们着陆的地形,以及对于漫游车或人类来说可能穿越的地形。为了帮助解决这个问题,来自瑞士的一组研究人员开发了一种无人机概念,可以帮助绘制月球上一些更有趣、潜在危险的探索区域。
多年来,绘制月球地图一直是当务之急。然而,一些更令人兴奋的区域,例如月球两极拥有大量水冰的永久阴影区域(psr),在其最佳图像中仅映射到每像素约1m的分辨率。这包括通过人工智能支持的算法进行人工增强。
这种分辨率水平还不足以为任何潜在的漫游车或人类任务提供有用的规划数据——给定的漫游车轮子本身的宽度不会超过这个水平,更不用说希望穿越那么大的障碍了。因此,我们发送的任何漫游车都必须手动控制,或者非常缓慢且自主地行驶。鉴于这些预期的漫游车任务的运行时间有限,缓慢的速度可能会限制它们寻找科学家认为隐藏在psr中的宝贵资源和地点的能力。
解决这个问题的明显方法是让另一种形式的机器人充当侦察兵,类似于“聪明号”最近为火星上的“毅力号”漫游车所做的事情。此次合作让perseverance创造了在另一个星球上单日自动驾驶最长距离的记录——总计约700m。如果侦察兵能够在潜在的月球车前面绘制出月球表面的细节,它的移动速度甚至可以比毅力号设定的速度更快。
为此,已经计划了很多任务来实现这一目标。在最近发表在《宇航学报》上的一篇论文中描述了他们的想法,罗密欧·托纳索和他在洛桑联邦理工学院的同事将这些现有的任务概念分为两类——大类和小类。
较大的系统可以包含经过测试的现成化学推进系统,这些系统在进行飞行测试时可能体积庞大并使用潜在危险的化学品。较小的系统可以使用不同形式的化学推进装置,例如h2o2火箭,甚至更普通的运动方式,例如用腿从地面跳下来。然而,许多用于此类推进的技术尚未达到足够高的开发水平,无法用于实际任务。
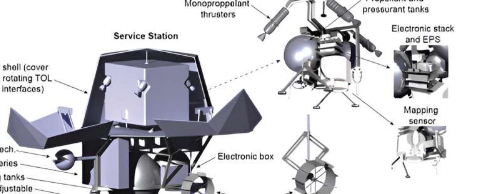
在较旧、较重的料斗模型和未经测试的新型料斗模型之间找到一个中间立场是新概念的主要设计限制之一。他们提出的九游官网首页进入的解决方案是一架火箭驱动的无人机,该无人机可以从基站发射并返回,并可以由流动站或其他月球探测车牵引。
每次飞行后,基站都会为无人机加油,使其能够进行多次飞行,同时不会携带过多的推进剂重量。通过这种设置,该系统可以绘制多达9平方公里的月球表面,其分辨率有助于月球车和人类任务规划。在这项工作结束时,基站必须补充燃料,使其能够继续执行其任务,这是设计概念的核心部分。
这个想法还有其他优点——许多其他跳跃者必须降落在地面上,它们的推进系统可能会给月球环境带来大量的混乱。如果它们着陆的表面恰好含有商业上可行的材料(例如水冰),那就尤其不受欢迎。返回移动对接站还可以消除任何灰尘扬起,考虑到灰尘在月球上沉降需要很长时间,灰尘扬起可能会严重阻碍该地区的操作。
虽然论文中有一些细节,包括一些使用经过空间测试的硬件的高级架构讨论,但到目前为止,这个想法还只是一个概念。然而,随着阿耳忒弥斯三号载人登陆日期的迅速临近,美国宇航局和其他航天机构无疑将从论文中描述的成功侦察任务中受益。不过,他们是否会将这个想法推向终点线还有待观察。