用于机器人和自主系统的多摄像头差分双目视觉传感器-九游官网首页进入
最近的技术进步促进了日益复杂的传感器的发展,这有助于提高机器人、无人机、自动驾驶汽车和其他智能系统的传感能力。然而,许多传感器都依赖于单独的摄像头,因此它们收集的测量结果的准确性受到摄像头视场(fov)的限制。
中国北京航空航天大学的研究人员最近开发了一种新型多摄像头差分双目视觉传感器,具有更宽的视场,可以收集更准确的测量结果。该传感器在《光学与激光技术》杂志上发表的一篇论文中介绍,可以集成到各种设备和智能机器人系统中。
“针对无人机检测、机器人导航、自动驾驶等环境感知的高精度要求,受到手机多摄像头模块的启发,我们推出了一种基于高精度双目原理的视觉感知模式视力测量,”该论文的合著者fuqiangzhou告诉techxplore。“这一原理涉及中央高分辨率摄像头和外围辅助摄像头的协同工作。”
周和他的同事最近研究的主要目标是开发一种具有更宽视场的传感器。通过利用多个摄像头并以战略性的方式放置它们,他们着手实现一个协调系统,该系统将比传统的基于单个摄像头的传感器收集更精确的测量结果。
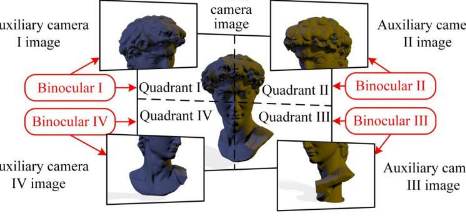
“我们的多摄像头差分双目视觉传感器由一个中央主摄像头和四个外围辅助摄像头组成,”周解释道。“主相机的四个象限图像与四个辅助相机图像形成四对双筒望远镜,从空间布置、测量范围和精度等方面优化传感器的结构参数,以收集高精度的三维测量结果”。
周和他的同事在一系列实验中测试了他们开发的传感器,发现其视场比传统双目相机的视场要宽得多。通过结合多个摄像头的视场,传感器可以收集更精确的周围环境测量结果。
“所提出的传感器比其他视觉测量方法具有更高的测量精度,特别是与相同的多摄像头测量方法相比,减少了摄像头数量,同时提高了测量精度,”周说。
未来,该研究团队开发的传感器可以集成到各种系统中,包括半自动或自动车辆、机器人和运动传感设备。这将使研究人员能够验证其在现实环境中的性能,并进一步调整其设计以促进其未来的商业化。
“在视觉测量领域,双筒望远镜是高精度的最佳选择。”周补充道。“基于所提出的原理和思路,实现了大视场的高精度视觉感知。通过小型工业相机与结构设计的结合,进一步实现小型化、轻量化,未来该传感器或将成为类似于激光雷达的标配智能无人系统。”